NSA 稀疏注意力机制 by deepseek
速度在64k inference相较 Flash Attention 前向加速9倍,反向加速6倍
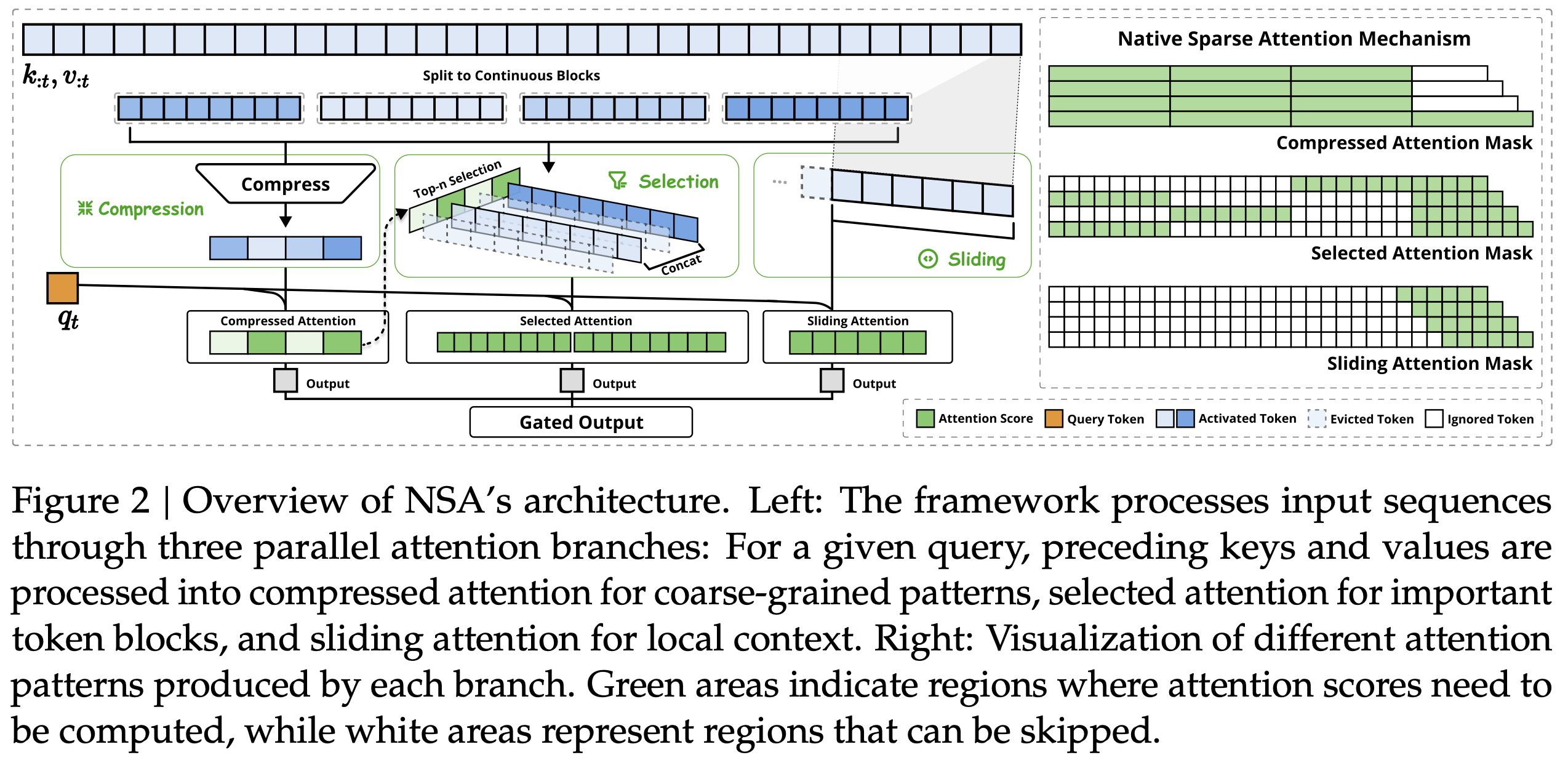
NSA的总体框架是通过更紧凑和信息密集的表示来替换原始的键值对 NSA有三种映射策略,分别是压缩(cmp)、选择(slc)和滑动窗口(win)。通过将不同策略得到的键值对进行组合理解
原理
假设上下文为64k时, 如果我们取128个全局压缩KV,8个512选择块KV和就近窗口4096个KV, 那么我们得到了压缩倍数7.88

- tokens压缩:通过将连续的键或值块聚合为块级表示,得到压缩后的键值,从而捕获整个块的信息
-
W_K_cmp = torch.randn(l, 1) #MLP: W2[1,4l]@(W1[4l, l]@X[l, d]) W_V_cmp = torch.randn(l, 1) W_pe = torch.randn(l, dim) K_cmp = [] V_cmp = [] for i in range(max_idx): cur_K = K[:, i * d + 0: i * d + l , :] + W_pe.unsqueeze(0) cur_V = V[:, i * d + 0: i * d + l , :] + W_pe.unsqueeze(0) cur_K = cur_K.transpose(1, 2) @ W_K_cmp cur_V = cur_V.transpose(1, 2) @ W_V_cmp K_cmp.append(cur_K) V_cmp.append(cur_V) K_cmp = torch.cat(K_cmp, dim = 2).transpose(1,2) V_cmp = torch.cat(V_cmp, dim = 2).transpose(1,2) print(K_cmp.shape) # torch.Size([1, 4, 16]) # 长度为32->4 print(V_cmp.shape) # torch.Size([1, 4, 16]) # 长度为32->4
-
- tokens选择:仅使用压缩键值可能会丢失重要的细粒度信息,因此需要选择性地保留单个键值
-
idx_slc_start = idx * d idx_slc_end = idx * d + l K_slc = torch.randn(batch_size, t, d * select_top_k, dim) V_slc = torch.randn(batch_size, t, d * select_top_k, dim) for i in range(batch_size): for j in range(t): for k in range(select_top_k): K_slc[i, j, k * d : k * d + l, :] = K[i, idx_slc_start[i, j, k ] : idx_slc_end[i, j, k ] , :] V_slc[i, j, k * d : k * d + l, :] = V[i, idx_slc_start[i, j, k ] : idx_slc_end[i, j, k ] , :] print(K_slc.shape) # bs, seq_len, select_kv, dim, 1,32,16,16, 不同t时刻选到不同的select_kv print(V_slc.shape) # bs, seq_len, select_kv, dim 1,32,16,16, 不同t时刻选到不同的select_kv
-
- 滑动窗口:为了防止局部模式主导学习过程,影响模型从压缩和选择tokens中学习,NSA引入了专门的滑动窗口分支来处理局部context,窗口注意力是捕捉与当前q最近的kv片段,这里做了假设,即越相近的KV就越重要
-
# built sliding window attention def get_window_mask(seq_len, window): mask = torch.ones(seq_len, seq_len) mask = torch.tril(mask) win_mask = torch.ones(seq_len - window, seq_len - window) win_mask = 1.0 - torch.tril(win_mask) mask[window:, :seq_len - window] = win_mask return mask print(get_window_mask(7, 3)) # test window_mask = get_window_mask(t, 8)
-
-
注意力聚合:在上述三个注意力计算中,我们都得到了同样维度
[1, 32, 16]的注意力输出-
o_list = [o_cmp, o_slc, o_win] o_star = torch.zeros(batch_size, t, dim) for i in range(3): o_star += gate[:, :, i].unsqueeze(2) * o_list[i] print(o_star.shape)
-
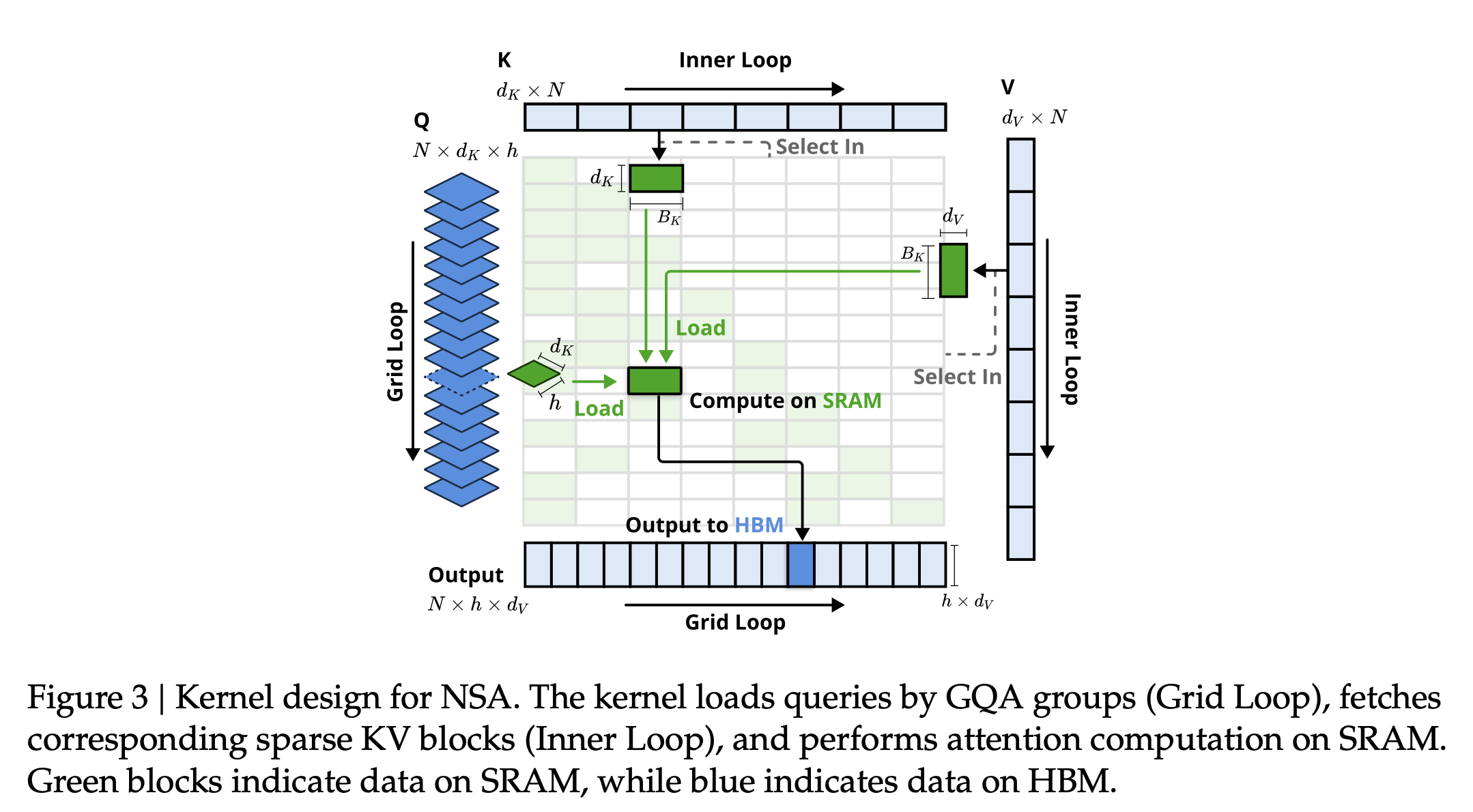
计算加速